
What is NEMS?
NEMS is an annual research symposium in the Northeast focused on robotic manipulation research of all kinds, including mechanics, mechanisms, control, learning, perception, and planning. NEMS has two main goals. First, to provide an opportunity for members of the Northeast robotic manipulation research community to meet and talk in person, share ideas, and become familiar with each other’s work. Second, to provide students and early-career researchers a platform from which to present their latest work.
NEMS 2025 Photo Gallery






Call for Papers
The New England Manipulation Symposium (NEMS) invites submissions of abstracts for poster and oral presentations at our 2025 symposium, to be held on Friday, June 6, 2025, at the MIT Stata Center. This non-archival symposium welcomes submissions of both published and unpublished work. We are particularly interested in research related to robotic manipulation, including mechanisms, control, learning, perception, and planning.
Submissions will be reviewed for relevance and quality, and we aim to accept all valid submissions for poster presentation. A subset of submissions will be selected for short oral presentations. All attendees are encouraged to register in advance so we can plan accordingly. Submissions are due 5/12/2025
Each presentation will be allotted a 15-minute time slot (12 minutes plus 3 for questions). You will use your own laptop, and you should arrive 15 minutes before your session starts to ensure that it works properly.
For posters, we recommend you print a hard-backed 36"x24" poster. If needed, we will provide poster board and clips. We will provide easels for all accepted posters.
Schedule
Morning Session I
Morning Session II
Afternoon Session I
Afternoon Session II
Accepted Posters
The New England Manipulation Symposium 2025 features 47 accepted poster. To improve accessibility and engagement, poster presenters are split across two interactive sessions: one in the morning and one in the afternoon. Below is a list of the accepted posters along with their assigned session.
Morning Session
-
Curating Non-Expert Demonstrations for Safer Imitation Learning
Noushad Sojib (UNH, presenter), et al. -
ROAMHand3: A multi-finger robotic hand for contact-rich dexterous manipulation tasks
Zhanpeng He (Columbia), et al. -
Occlusion-Robust Keypoint Detection via Inpainting for Vision-Based Control of Robotic Manipulators
Sreejani Chatterjee (WPI, presenter), et al. -
Consensus-Driven Uncertainty for Robotic Grasping based on RGB Perception
Eric C Joyce (Stevens IT, presenter), Qianwen Zhao, Nathaniel Burgdorfer, Long Wang, Philippos Mordohai -
Safe Autonomous Environmental Contact for Soft Robots using Control Barrier Functions
Akua K Dickson (Boston Univ, presenter), et al. -
Touch begins where vision ends: Generalizable Policies for Contact-Rich Manipulation
Zifan Zhao (NYU, presenter), et al. -
Miniature Bi-Manual End-effector
Zewen Chen (Columbia, presenter), et al. -
Streaming Flow Policy
Sunshine Jiang (MIT, presenter), et al. -
Feedforward Motor Control
Rakshith Lokesh (Northeastern, presenter), Dagmar Sternad -
Scalable Real2Sim
Nicholas Pfaff (MIT, presenter), Evelyn Fu, Jeremy Binagia, Phillip Isola, Russ Tedrake -
Embodiment and control of a complex object: hitting a target with a whip
Aleksei Krotov (Northeastern, presenter), Dagmar Sternad -
Acoustic Tactile Sensing
Wilfred Mason (McGill, presenter), Audrey Sedal -
Experimental Platform for Soft Robot Limbs
Juan C. Pacheco Garcia (Boston Univ, presenter), et al. -
ActivePusher: Active Learning and Planning with Residual Physics for Nonprehensile Manipulation
Zhuoyun Zhong (WPI, presenter), et al. -
Self-Sensing in Soft Robots
Ran Jing (Boston Univ, presenter), et al. -
Optimizing ConvNets with Gabor Filters
Syed Azhar Hussain Quadri (NEU, presenter) -
Viscous Thread Printing (VTP)
Jacob Miske (Northeastern, presenter), Brett Emery, Jeffrey Lipton -
Expansion-GRR
Zhuoyun Zhong (WPI, presenter), et al. -
Learning based Collaborative Control for Multiagent Tactile-Reactive Grasping
Chuangchuang Sun (Mississippi State, presenter), et al. -
PopcornFT Sensors
Kai Jiang (Columbia, presenter), Eugene Sohn (Columbia, presenter), et al. -
ManiFeel: Visuotactile Manipulation
Zhengtong Xu (Purdue, presenter), et al. -
DEXOS: Hand Exoskeleton System for Teaching Robot Dexterous Manipulation In-The-Wild
Haoshu Fang (MIT, presenter), et al. -
Bend, Flex, and Scrub: Using a Soft Robot for Safe, High-Contact Surface Cleaning
Jakub Kowalewski (Northeastern, presenter), et al. -
Onboard Sensing and Pushing of Unknown Payload for CoM Estimation with a Holonomic Mobile Robot
Steven Hyland (WPI, presenter), et al. -
Learning based Collaborative Control for Multiagent Tactile-Reactive Grasping
Leonel Giacobbe (Mississippi State University, presenter), et al.
Afternoon Session
-
V-HOP: Visuo-Haptic 6D Object Pose Tracking
Hongyu Li (Brown, presenter), et al. -
Can rigid grasp policies transfer to soft grippers?
Shiyao Ni (McGill/Mila, presenter), et al. -
Modular Soft Magnetic Sensor
Neehal Sharrma (WPI, presenter), Cagdas Onal -
Striking a Target with a Whip
Mahdiar Edraki (Northeastern, presenter), et al. -
A Tetherless Soft Robotic Wearable Haptic Human Machine Interface for Robot Teleoperation
Shilpa Thakur (WPI, presenter), et al. -
One-Shot Real-to-Sim
Yifan Zhu (Yale, presenter), et al. -
Equivariant Manipulation with RGB
David Klee (NEU, presenter), Robin Walters -
Picking with Soft Continuum Robot
Abhinav Gandhi (WPI, presenter), Berk Calli -
AnySkin
Raunaq Bhirangi (NYU, presenter), et al. -
Forces for Free: Vision-Based Contact Force Estimation with a Compliant Hand
Yifan Zhu(Yale), Mei Hao (Yale, presenter), et al. -
eFlesh: Highly customizable Magnetic Touch Sensing using Cut-Cell Microstructures
Venkatesh Pattabiraman (NYU, presenter), et al. -
Developing Datasets to Support Robotics for Manufacturing Research: The NIST Manufacturing Objects and Assemblies Dataset (MOAD)
Peter Gavriel, Kenneth Kimble, Adam Norton, Megan Zimmerman -
Parameter-Free Segmentation of Robot Movements with Cross-Correlation Using Different Similarity Metrics
Brendan Hertel (UMass Lowell, presenter), et al. -
Composite Distributed Learning
Emadodin Jandaghi (URI, presenter), et al. -
Compact Stiffness Modulation
Marc Bäckert (Harvard/ETH, presenter), et al. -
The Role of Singularities
Carlos Lück (USM, presenter) -
Physics-Driven Data Generation
Lujie Yang (MIT/RAI, presenter), et al. -
Modular Tool for Non-Prehensile Interactions
Cedric-Pascal Sommer (Harvard, presenter), et al. -
Towards Improving Open-Source Benchmarking
Adam Norton (UMass Lowell, presenter), et al. -
Vibration-induced Friction Modulation to Enable Controlled Sliding for In-hand Manipulation
Shambhuraj Mane (WPI, presenter), et al. -
Evaluation of Movement Primitive Methods for Constrained Motion Generation and Composition
Andrea Pierré (UMass Lowell, presenter), et al.
Registration
Registration for NEMS 2025 is now closed. Please contact the organizers if you have any questions.
Location
NEMS 2025 will take place at the MIT Stata Center, located at 32 Vassar St, Cambridge, MA 02139.
To get to the Stata center, please enter from either the east or west entrances, and navigate to the black star for conference registration.
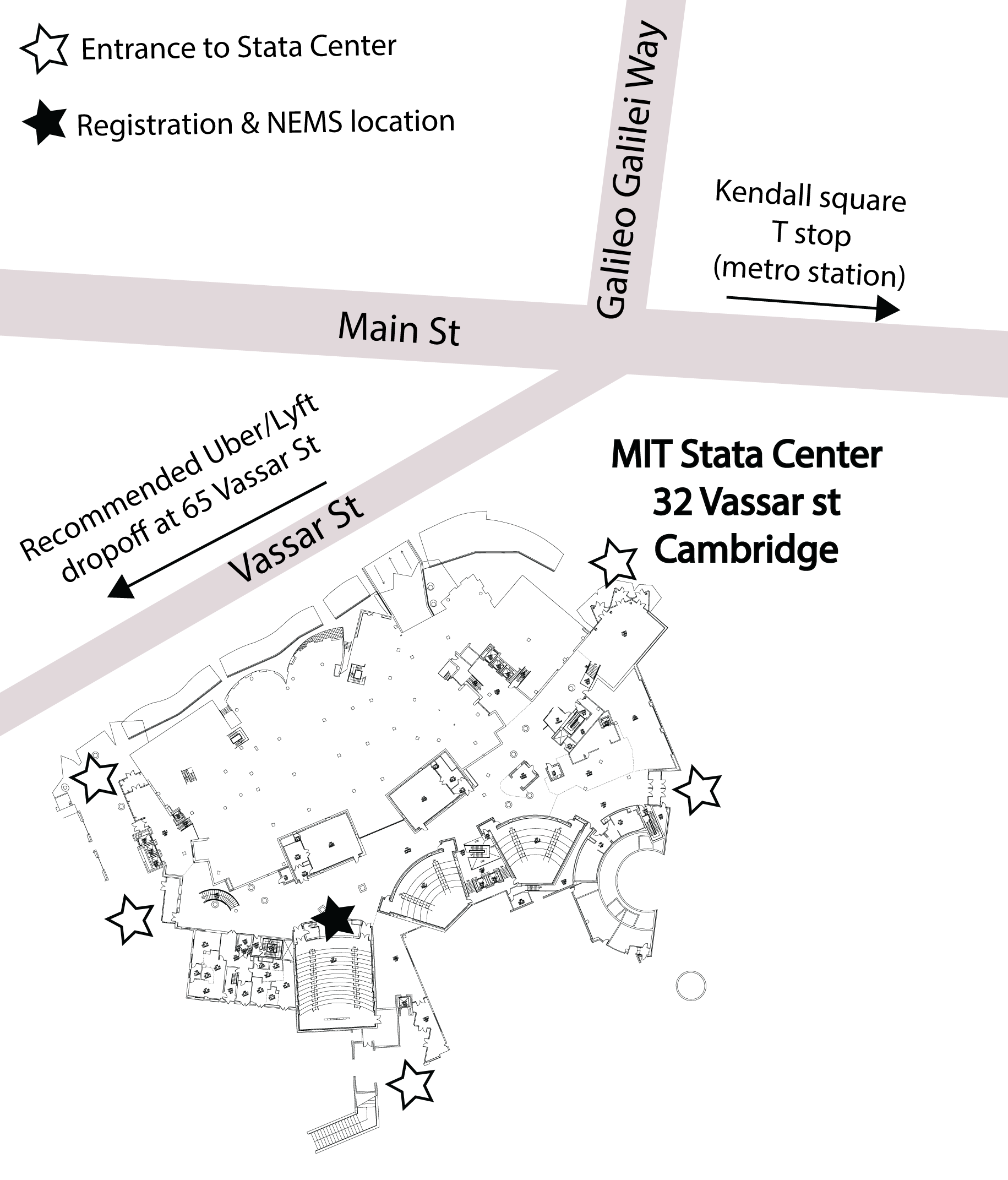
For attendees looking to drive into the conference, we recommend parking at the Kendall Center Yellow Garage. The entrance for the Kendall Center Yellow Garage is on Ames Pl and the address is 75 Ames St, Cambridge, MA 02142.
Sponsors

Contact
For more information, please contact the NEMS 2025 organizers:
- Lael Odhner: lael@rai-inst.com
- David Watkins: davidwatkins@cs.columbia.edu
- Kaitlyn Becker: kait@mit.edu